
�������: 1-5 ���鵽����ѧ GRASP����ؼ�¼5�� . ��ѯʱ��(0.062 ��)
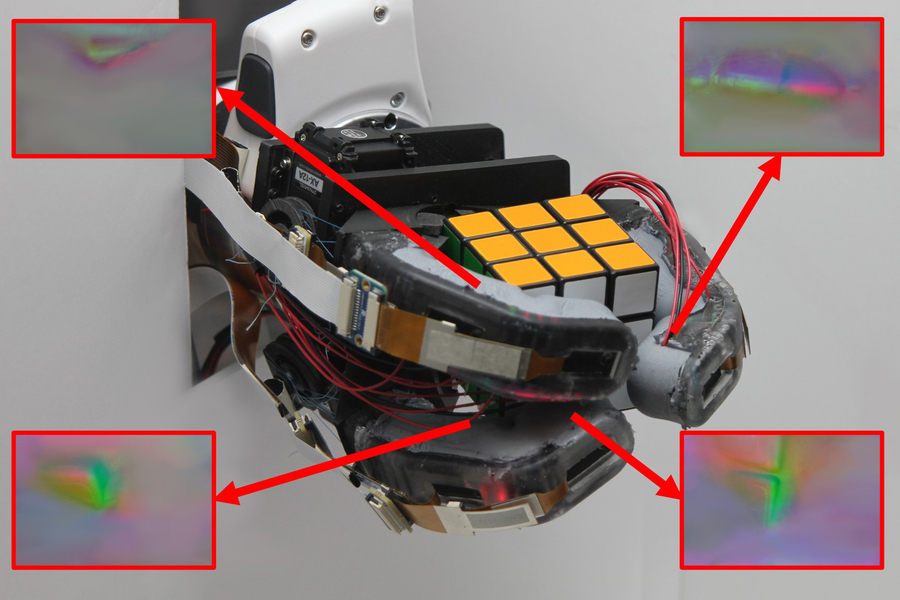
Inspired by the human finger, MIT researchers have developed a robotic hand that uses high-resolution touch sensing to accurately identify an object after grasping it just one time.
PRECISIONS MEASUREMENT FOR THE GRASP OF WELDING DEFORMATION AMOUNT OF TIME SERIES FOR LARGE-SCALE INDUSTRIAL PRODUCTS
Large-scale Industrial measurement Weld Deformation Precise Measurement Ship Building
2015/5/21
As well as the BIM of quality management in the construction industry, demand for quality management of the manufacturing process of the member is higher in shipbuilding field. The time series of thre...
Design and Comparison of Simulated Annealing Algorithm and GRASP to Minimize Makespan in Single Machine Scheduling with Unrelated Parallel Machines
Makespan Simulated Annealing Algorithm GRASP Unrelated Parallel Machines Mathematical Model
2013/1/29
This paper discusses design and comparison of Simulated Annealing Algorithm and Greedy Randomized Adaptive Search Procedure (GRASP) to minimize the makespan in scheduling n single operation independen...
Ϊ�˸���GRASP�ľ����ԣ������һ���ܽ������α������PB���ͺ�ȡ��ʽ��CNF�����Լ��������µĻ���㷨��H-GRASP���������㷨����������ƽ�漼������ȡPBԼ������֮������ۣ���������ϵ���ͨ���̺�ͼ�У����������ͻ��ѧϰ���������Լ��������������ַ��������������Թ滮�ʹ�����SAT���������˳��ıȽϡ�ʵ����֤����H-GRASP�����������ϴ�����������ʱ�䣬�ӿ����ٶȣ�ͬʱ����֤��...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...